


zcaner
-
İçerik sayısı
3 -
Katılım
-
Son ziyaret
zcaner Hakkında
-
Derece
Newbie
")
-
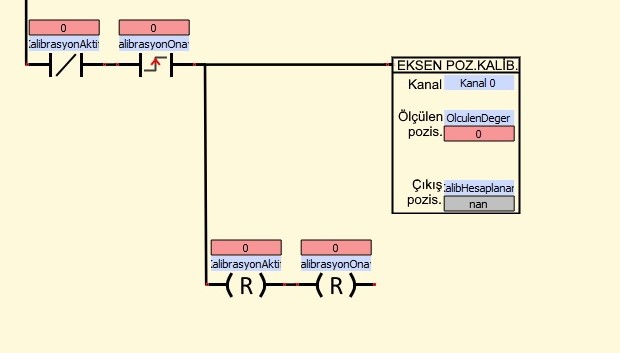
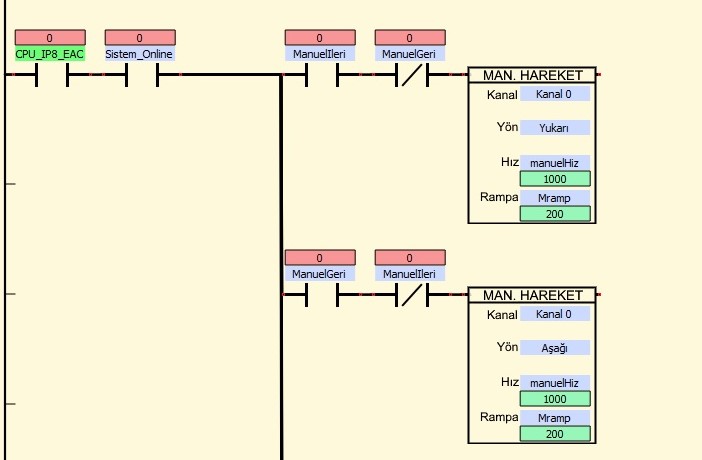
Merhaba görsel de de görebileceğiniz gibi Çıkış Pozisyonu kısmında değer nan olarak görünüyor. Konuyu baştan izah etmek gerekirse program başta tamamen sorunsuz işliyordu. Sistem kuruldu makina başında programı attım sensör vs. testlerini yaparken de hiçbir problem yoktu. Birden servo Manuel harekette sanki 5-6 tane rampa varmış gibi hızlanıyor yavaşlıyor tekrar hızlanıyor tekrar yavaşlıyor vs. Canlı da GMTsuite den kontrol ettiğimde Eksen Pozisyon Kalibrasyon fonksiyonunda Çıkış Pozisyon değeri "inf" (muhtemelen infinity - sonsuz) değeri gösteriyordu. durdurup tekrar çalıştırdığımda NAN oldu ve öyle kaldı. Programın sadece basit bir servo pozisyon ve manuel kısmı olacak şekilde yeniden yaptım. (Ana programımda gözden kaçırdığım bir hata olabilir düşüncesiyle) Ancak sonuç aynı, farklı değişken isimleri verdim olmadı. GMTSuite i güncelledim olmadı. GLC-396T kullanıyordum GLC-196T ile denedim olmadı, simulasyonda da olmadı ve artık sizden yardım almak için buraya yazıyorum. Sonunun nereden kaynaklı olduğunu bulamadığım için çözüm de bulamadım. Daha önce bu ve benzeri 10 dan fazla uygulama yaptım gmt plc ile ve böyle bir sorunla hiç karşılaşmadım. Ek olarak C# ile birkaç değer okuyor ve yazıyordum plc ye ancak eksen pozisyon kalibrasyonu ile ilgili bir işlem yok. Zaten halen bu verileri okuyup yazabiliyorum sorun yok sadece artık kalibrasyon yapamadığım ve manuel hareket komutları saçmaladığı için makinanın kalbi olan servoyu kullanamıyoruz. Şimdiden ilginiz ve desteğiniz için teşekkürler.
-
GMTSuit kullanıyorum. http://gmtcontrol.com/tr/yuklemeler/ornek-uygulamalar.html bu linkteki örnek uygulamayı denedim tek örnek vardı ve forumda da baktım ama fark etmemişim. Teşekkür ederim..
-
Merhaba, C#] üzerinde bir uygulama yapıyorum anacak plc ye real ve double veri okumak ve yazmak konusunda sorun yaşıyorum. yardımcı olabilir misiniz. PLC de real ve double verilerin modbus adresleri 42000 şeklinde başlıyor ve bunu C# üzerinden hiçbir şekilde okuyamadım veya yazamadım. Aynı zamanda ek bilgi olarak yukarıdaki örnek dosyayı bende indirdim ancak kodlar çalışmıyor. Sanırım EasyModbus kütüphanesinde bir güncelleme olmuş olabilir. Örneğin. sizin örneğinizde int[] mi = tcpclient.ReadHoldingRegisters(1000 + c, 2); int[] mf = tcpclient.ReadHoldingRegisters(4000 + d, 2); bu kodlar da çalışmıyor. Bunlar yerine int[] mi = tcpclient.ReadHoldingRegisters(0 + c, 2); int[] mf = tcpclient.ReadHoldingRegisters(0 + d, 2); şeklinde kullanınca sorunsuz çalışıyor. Ancak başta belirttiğim gibi real ve double tipi değişkenler için otomatik oluşan ve 42000 le başlayan modbus adresine hiçbir şekilde ulaşamıyorum. Şimdiden desteğiniz için teşekkürler.