
Genel Araştırma
'servo' etiketi için arama sonuçları.
Araştırmada 5 sonuç bulundu
-
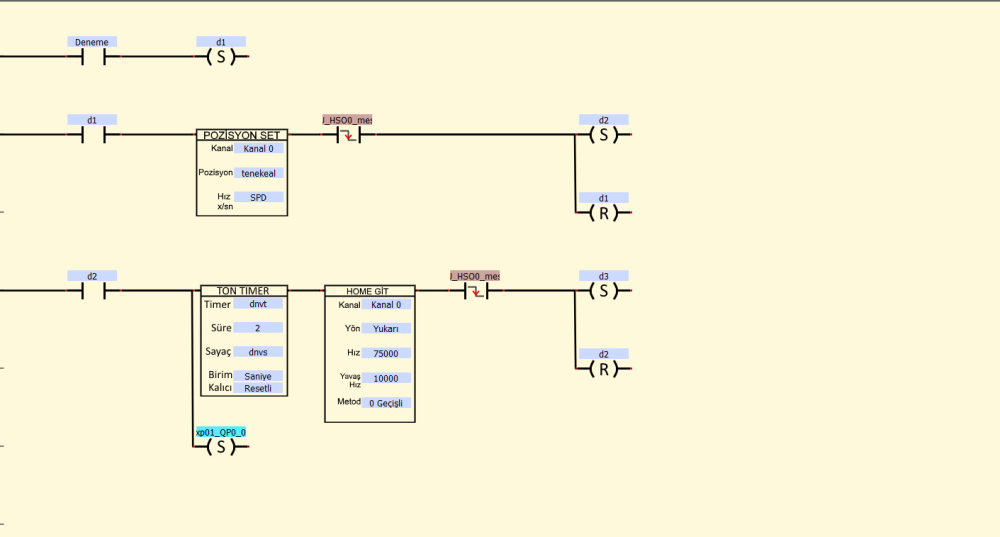
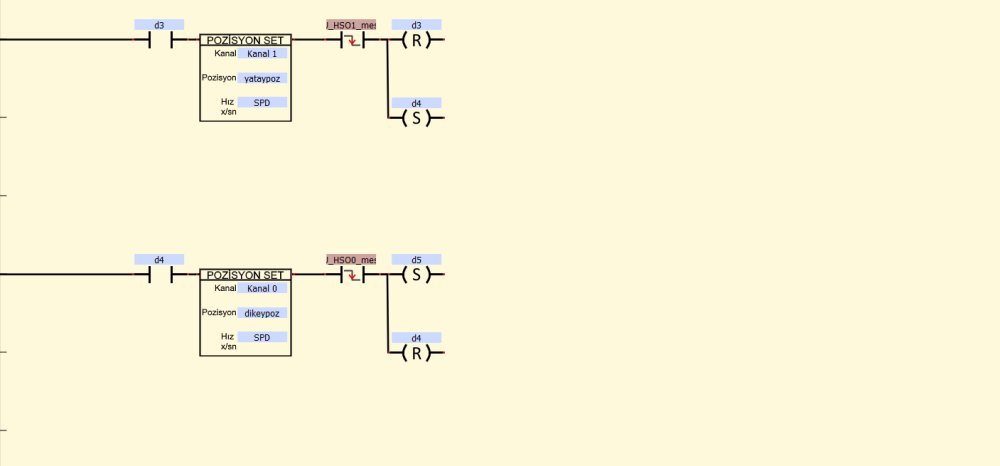
Merhaba; ben 2 adet servo motor (750W GSS3-2RS) ve 296T ile proje geliştiriyorum. Projede motorlar iki adet vidalı mili hareket ettiriyor. servo motorların eksen poz. kalibrasyonlarını yaptım. (home a git -> manuel olarak mekanizmayı belirli seviye aşağı indirdim -> kalibre ettim -> rampa set ettim) daha sonra iki ekseni home a aldıktan sonra aşağıdaki deneme kontağını çalıştırdım. sistem d4 kontağına kadar çok düzgün bir şekilde çalışıyor. Vidalı miller istediğim noktaya mekanizmayı getiriyor. Ancak d4 kontağında bulunan pozisyon set istediğim noktaya gitmiyor ve her seferinde mekanizmanın yukarı çarpmasına sebep oluyor. değerler üzerinden anlatmam gerekirse tenekeal = 900 (HSO Toplam puls adedi = -898331) -> 90cm yataypoz = 1300 dikeypoz = 1000 değerlerini girdiğimde dikeypoz 0 noktasından 1000 noktasına inmesi gerekirken direkt home switch in üstüne doğru çıkarak mekanizmayı tavana çarptırıyor. (acil stop için koyulan emniyet sensörünü de geçiyor). dikeypoz değerini 500 girdiğimde yine aynı sonuç oluyor. -500 gibi negatif bir değer kullandığımda da yine mekanizma aşağı inmek yerine tavana çarpıyor. sistemi manuel olarak kontrol ettiğimde hiç bir problem yaşamıyorum mekanizmalar basılan buton yönünde çalışıyor. sorunu bulmanızda yardımcı olması adına şu bilgiyi de paylaşayım. kanal0 da ilk önce pozisyon set ile 900 noktasına git dediğimde yapması gerektiği gibi 90 cm mekanizmayı aşağı indiriyor ve 900 noktasına gitmiş oluyor. Daha sonra 300 noktasına git dediğimde ise sistem 300 noktasına gitmiyor onun yerine 1200 noktasına gidiyor. Elde edilen puls adedi -1197774 problemi çözmemde yardımcı olursanız çok sevinirim
-
Suite yazılımında Manuel Hareket bloğunda duruş rampası çözüldümü? ve Home Git bloğunda da rampa komutlarının da çalışmadığını belirtmek isterim.
-
-
Merhaba, Servo sürücüden yön ayarını değiştirmek istiyorum. H17 parametresinde fabrika değeri olarak 1 görünüyor. bunu 0 olarak değiştirip H00 parametresini 1 olarak ayarlayıp kaydediyorum ancak yön değişmiyor. H17 parametresine tekrar geldiğimde değerin yine 1 olduğunu görüyorum. sorun nerden kaynaklanıyor? yardımcı olursanız sevinirim, teşekkür ederim
-
Merhabalar, Elimde 296t tip plc ve monofaze 750 W servo drive var. Absolute pozisyonlama yapmak istiyorum. Birinci sorunum, PLC'ye bağlanma noktasında. Kendi kullandığım leptop ile bir türlü bağlanamazken başka bir leptop ile bağlanabiliyorum. Ağ ayarlarını, otomatik ya da statik IP olarak her iki şekilde de, değiştirdim ancak sonuç alamadım. Aynı leptop GMTsoft'lu plclere bağlanıyor. Atladığım bir husus mu var? yardımcı olursanız sevinirim. ikinci sorum suite ile anladığım kadarıyla absolute pozisyonlama yapabiliyoruz. sitedeki örnek yazılımları inceledim. buna göre enerjilenme bölümüne eksen kurulum komutunu tanımladım. home pozisyon, manuel ileri geri ve sürekli puls üretme komutlarını sorunsuz çalıştırdım. ancak pozisyon set komutunu çalıştıramadım. (pozisyon set öncesinde rampa komutlarını aktif ettikten sonra pozisyon set komutunu aktif ettim) sanırım sorun 0 değerini görememiş olmam. konu ile ilgili daha ayrıntılı döküman varsa ya da beni aydınlatabilirseniz sevinirim. iyi çalışmalar dilerim.



