


Hanifi
-
İçerik sayısı
463 -
Katılım
-
Son ziyaret
-
Days Won
72
İçerik Türü
Profiller
Forumlar
Günlükler
Takvim
İletiler bölümüne Hanifi kullanıcısının eklediği dosyalar
-
-
PLC - Step ve HMI lı düzenekte, PLC pulse çıkışı ile Step motor sürücü kontrol edilerek pozisyon kontrolü yapılmıştır. Uygulama örnek olarak yapılmıştır. Detaylar aşağıdaki gibidir.
360 derecelik dönüşü 3200 pulse olarak step sürücünden ayarlanmış sistemin;
MOD 1 :
· İstenilen derece miktarı kadar ilerlemesi sağlanacak.
MOD 2 :
· Gitmesi istenilen açı mutlak pozisyon kontrol ile sağlanacak.
MOD 3:
· İstenilen açıya mutlak kontrol ile sadece saat yönünde gitmesi sağlanacak.
FİZİKSEL BAĞLANTILAR
PLC GLC396T - Sürücü GSTD2860 – Step Motor GSTM86-080-842
· Step Sürücü PUL+ ucu PLC QP0 Çıkışına
· Step Sürücü DIR+ ucu PLC QP3 Çıkışına
· Step Sürücü PUL- ve DIR- uçları güç kaynağının 24VDC - ucuna bağlanmıştır.
· PLC IP0 Girişine Home sensörü bağlanmıştır.
-
 1
1
-
-
Bu reçete örneğinde HMI kapatılmadan önce hangi reçete seçili ise, HMI tekrar enerjilendiğinde en son seçili reçete ile açılmaktadır.
Reçete_Örneği_(Enerji_Gidip_Geldikten_Sonra_Durumunu_Koruyan).rar
-
GMTSoft olan bir PLC, GMTSuite ile çalışacak formata kullanıcı tarafından çevrilebilirken, GMTSuite olan bir PLC, GMTSoft a kullanıcı tarafından çevrilemez
-
Toplamkilo=Toplamkilo+30
Operantlar kısmından kalıcı seçeneğini aktif ederseniz. Register kalıcı olur
-
-
-
Merhaba, Windows unuz da bulunan yada sonradan eklenen font dan kaynaklanan sıkıntıdır. Ekteki font dosyasını Windows fonts klasörüne ekleyip, eklediğiniz fontu seçerseniz düzgün olacaktır. Başka font dosyaları da deneyebilirsiniz.
-
 1
1
-
-
GMTSuite ile yapmanız mümkündür.
-
Yeni proje açtığınızda benzer hata oluyor mu?
Denemelerinizi offline mı deniyorsunuz?
Lütfen hata aldığınız programı ekleyin
GMTSuite versiyonunuz kaç gözüküyor?
Belirttiğiniz kod çalışıyor
-
Geri bildiriminiz için teşekkür ederiz. Konu ile ilgili değerlendirme yapılacaktır.
-
PLC ye bağlandığınızda Tarama frekansı GMTSuite yazılımında sağ alt köşede belirtilmektedir. Program yoğunluğuna göre değişmekle beraber bu değer 10-15 kHz mertebelerindedir.
Devir hesaplama yönteminizi paylaşırsanız inceleriz. Sizin sensörünüzden gelecek sinyalinizin max. da hızı nedir?
-
Operand listesinde kullanmadıklarınızı manuel olarak tek tek silmelisiniz.
-
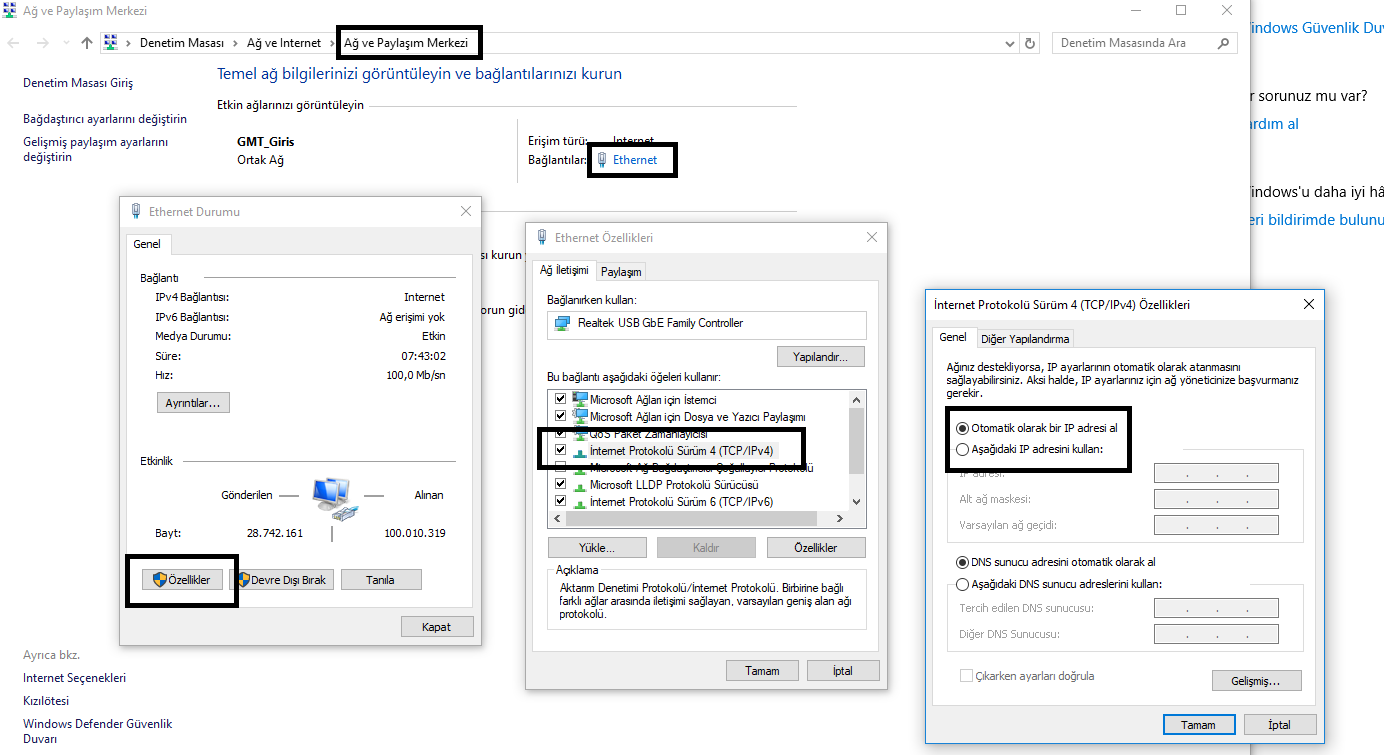
There is no any communication port
-
Bu versiyonla birlikte program Türkçe ya da İngilizce olarak kurulabilmektedir.
GMTCNT TCP driver' ı ile GLC396X ve GLC496X serisi PLC' lerle ethernet portundan iletişim kurulabilmektedir.Eklenen GMTSuite PLC driver' ı ile GMTSuite ile geliştirilen PLC yazılımlarından tag listesi yüklenebilmektedir
-
1
-
-
Merhaba
Teorik bilgiyi mi soruyorsunuz, Yoksa deneysel çalışma mı yapacaksınız. Teorik olarak kaç adet bağlanacağı bellidir. Fakat pratikte, ortamdaki parazit, sorgu sayısı ve istenilen hıza göre bu durum değişiklik göstermektedir. Modbus RTU da yapı "sor-cevap al -sonraki sorguya" geç şeklindedir. Sorgulama dinamik bir zaman döngüsüne sahip olmakla beraber sorgular arasında ekstra olarak ms mertebelerinde beklemeler vardır.
-
PLC~HMI arasında RS232 kullanırken. PLC~Inverter arasında RS485 kullanmanızı öneririm.
-
1
-
-
Modbus TCP master ve slave desteği vardır.
Master sadece GMTSuite ile mümkündür.
Slave is GMTSoft ve GMTSuite ile mümkündür
-
GMTCNT Servo Elektronik Gear Açıklamalarını ekteki dokümanda bulabilirsiniz.
GMTCNT SERVO SiSTEMLERi iÇiN ELEKTRONiK GEAR (DiŞLi) HESAPLAMASI.pdf
-
2
-
-
STP formatında yeni nesil TSG serisi HMI ların 3D çizim dosyalarına ulaşabilirsiniz.
-
Derlenemeyen kodu içeren programı burada paylaşırsanız inceleyip cevap verebiliriz.
1. Hatada bahsettiğiniz durum için eğer register DegAint operantlar listesinde tanımlı bir register ise DegAint=12; hatasız derler.
Tab tuşu ile aralık verdiğimde dediğiniz durum için ; olmadığı için derlemez.
-
GMTSuite Modbus Master kısmı dinamik çalışan bir yapıya sahiptir. Sorulan soruya cevap geldiği anda 1 sonraki sorguya geçer.
Modbus teorisinde sorgu sırayla sorulduğundan sorgu sayısı arttıkça gecikmede artacaktır.
Bu durumda haberleşmeyi hızlandırmak için:
1. Mümkün olduğu kadar tek cihazdan sorulan sorguyu azaltın, Frekansı haberleşmeden yazarken, start komutunu dijital çıkışlardan verilebilir.
2. Haberleşme hızını mümkün olduğu kadar artırın.
3. Sorgu kayıplarını engellemek için kablo bağlantılarının düzgün olduğuna emin olun. Burgulu kablo vs. dikkat edilmelidir.
iyi çalışmalar
-
1
-
-
PLC ile jeneratör arası transfer derken haberleşme yapmayı kastediyorsanız. GMTSuite örnek uygulamalar kısmında PLC ile Micno inverter haberleşme programını inceleyebilirsiniz. İnverter yerine jeneratör cihazınızı varsayabilirsiniz. Diğer durum için uygulamanıza göre lojik komutları kullanmalısınız.
-
Modbus TCP Master Çoklu veri Okuma-Yazma için küme kullanımın anlatıldığı dokümana ulaşabilirsiniz.
Bu yöntem ile tek frame üzerinden çoklu veri gönderimi mümkün olmaktadır.
MODBUS TCP MASTERDA TOPLU VERİ OKUMA VE YAZMA İÇİN KÜME KULLANIMI.pdf
-
Sanırım skala demek istediğiniz.
Birkaç yöntem uygulanabilir.
1. PLC içinde ladder da lineer fonksiyonu kullanarak
2. Donanım konfigürasyonun da max-min skala değerlerini değiştirerek
3. HMI da Oransal bölümünü aktif ederek.

196T programlama
in GMTSuite FORUM
gönderildi
Pd-04 parametresine 0 dan farklı bir değer girildiğinde, girilen değer boyunca master cihazdan sorgu gelmez ise (Yani haberleşme koparsa) Hız kontrol cihazı hataya geçecek ve motor duracaktır.
Cihaz serbest stop yapacaktır. Eğer yavaşlamalı durması istenirse P9-47 parametresi 10000 olarak ayarlanmalıdır.